探索自動駕駛,引領智慧交通-交大團隊進行基于深度強化學習的
自動駕駛交通流運行特征研究
自動駕駛是指通過感知、決策和控制技術實現車輛在道路上無需人工干預地進行導航、行駛和操作的技術和系統。自動駕駛技術為現有的交通系統提供巨大機遇的同時,也給交通管理帶來了巨大的挑戰,尤其是高速公路匝道路段復雜交通狀況下的交通影響尚不清楚。因此,研究團隊對此問題進行深入探索。
交通領域頂級期刊《IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS》發表了上海交通大學船舶海洋與建筑工程學院交通運輸工程系陸林軍團隊相關的研究成果“Operational Characteristics of Mixed-Autonomy Traffic Flow on the Freeway With On- and Off-Ramps and Weaving Sections: An RL-Based Approach”
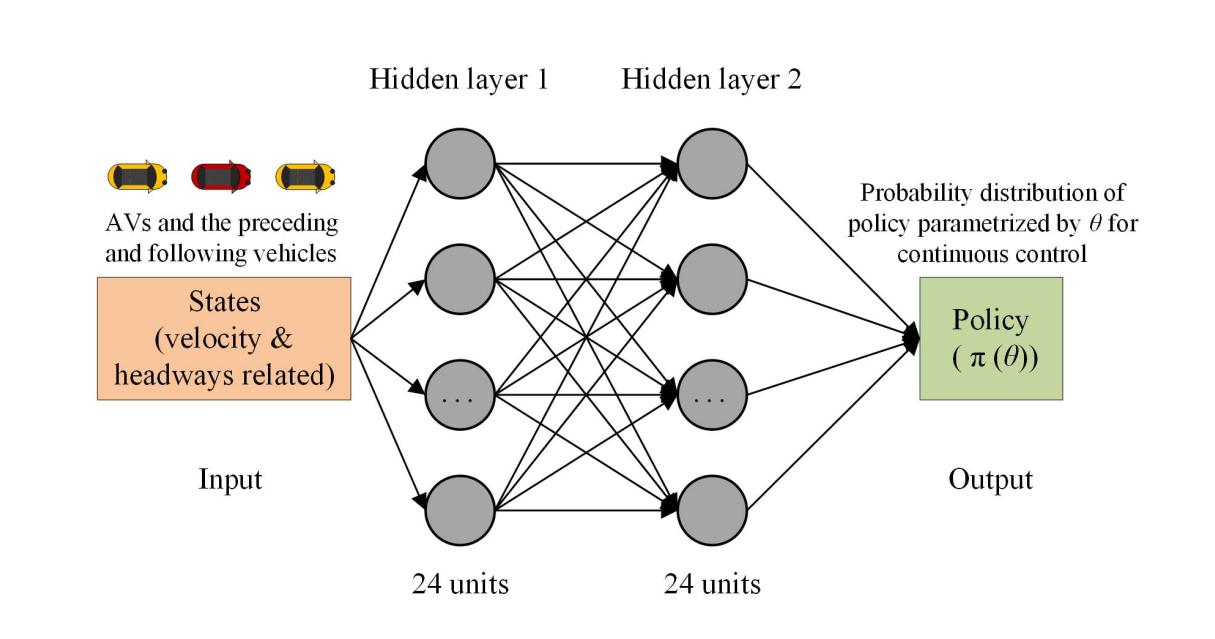
圖一:深度強化學習自動駕駛策略模型
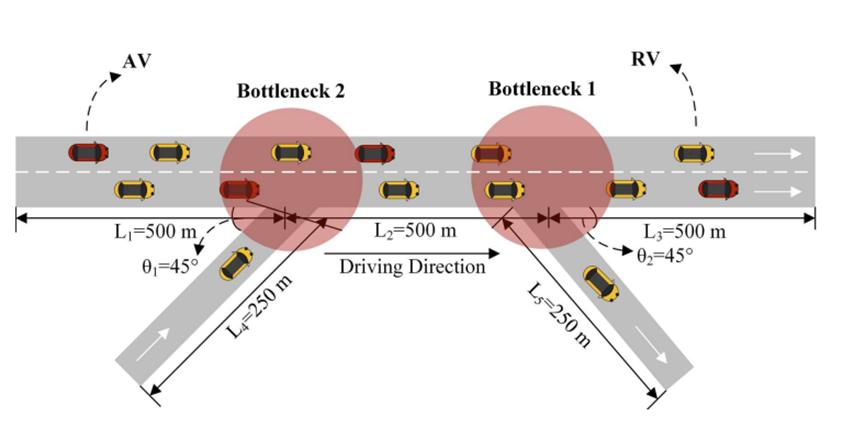
圖二:自動駕駛混合交通流場景
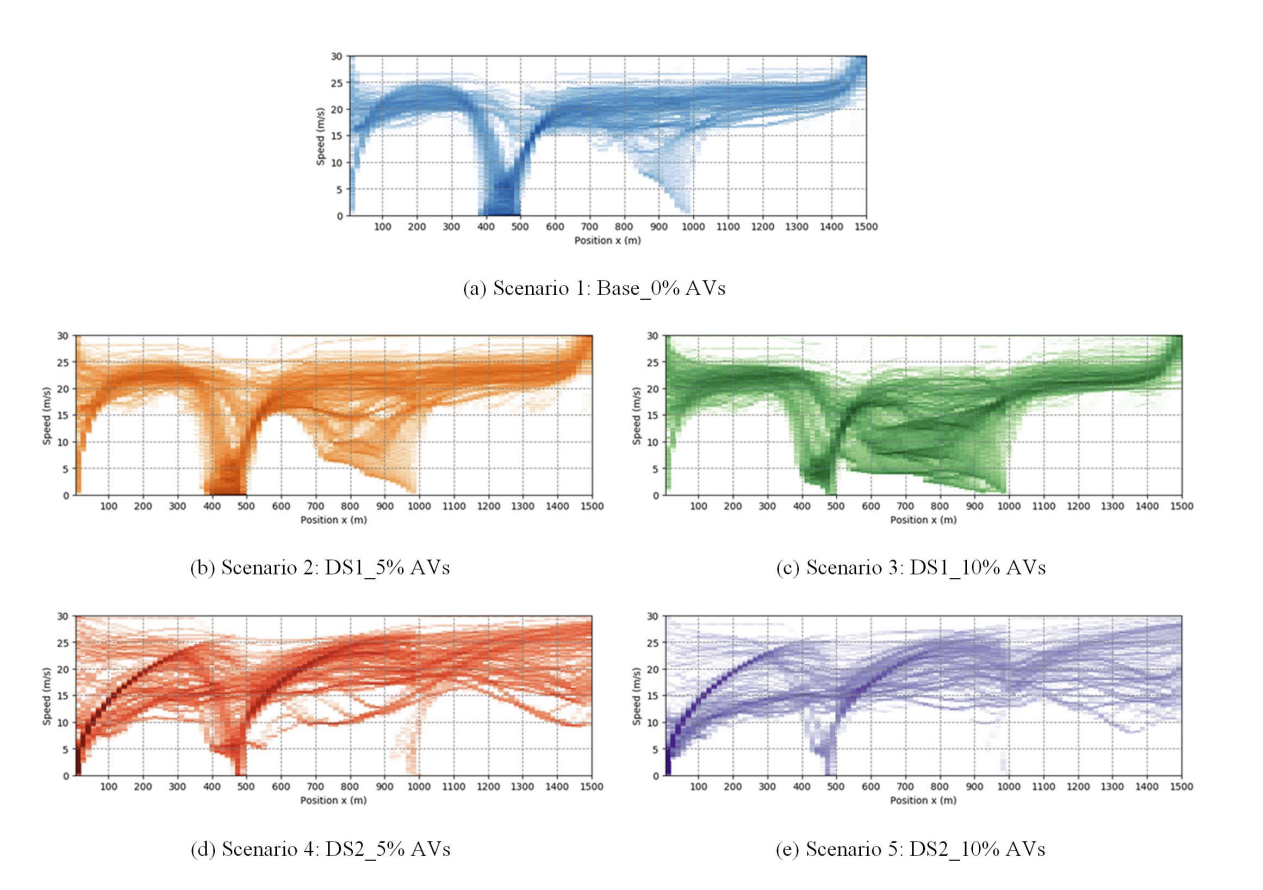
研究團隊提出了基于深度強化學習的自動駕駛策略模型,探究不同的自動駕駛策略(DS1、DS2)、滲透率(5%、10%)和關鍵交通條件下對交通擁堵、安全、效率和乘客舒適度等的影響。利用開源微觀交通仿真平臺SUMO構建不同的駕駛策略和滲透率交通仿真場景,模擬自動駕駛在高速公路匝道路段混合交通流中的交通運行特征。研究結果表明,采用深度強化學習駕駛策略的自動駕駛汽車能夠顯著緩解高速公路匝道路段的交通擁堵,提高運行效率且在混合交通流中具有較低的碰撞風險,但在一定程度上影響了乘客的舒適度體驗。總的來說,本研究提高了對高速公路匝道路段復雜交通狀況下自動駕駛機制的理解,并期于為未來相應的交通管理措施提供見解。
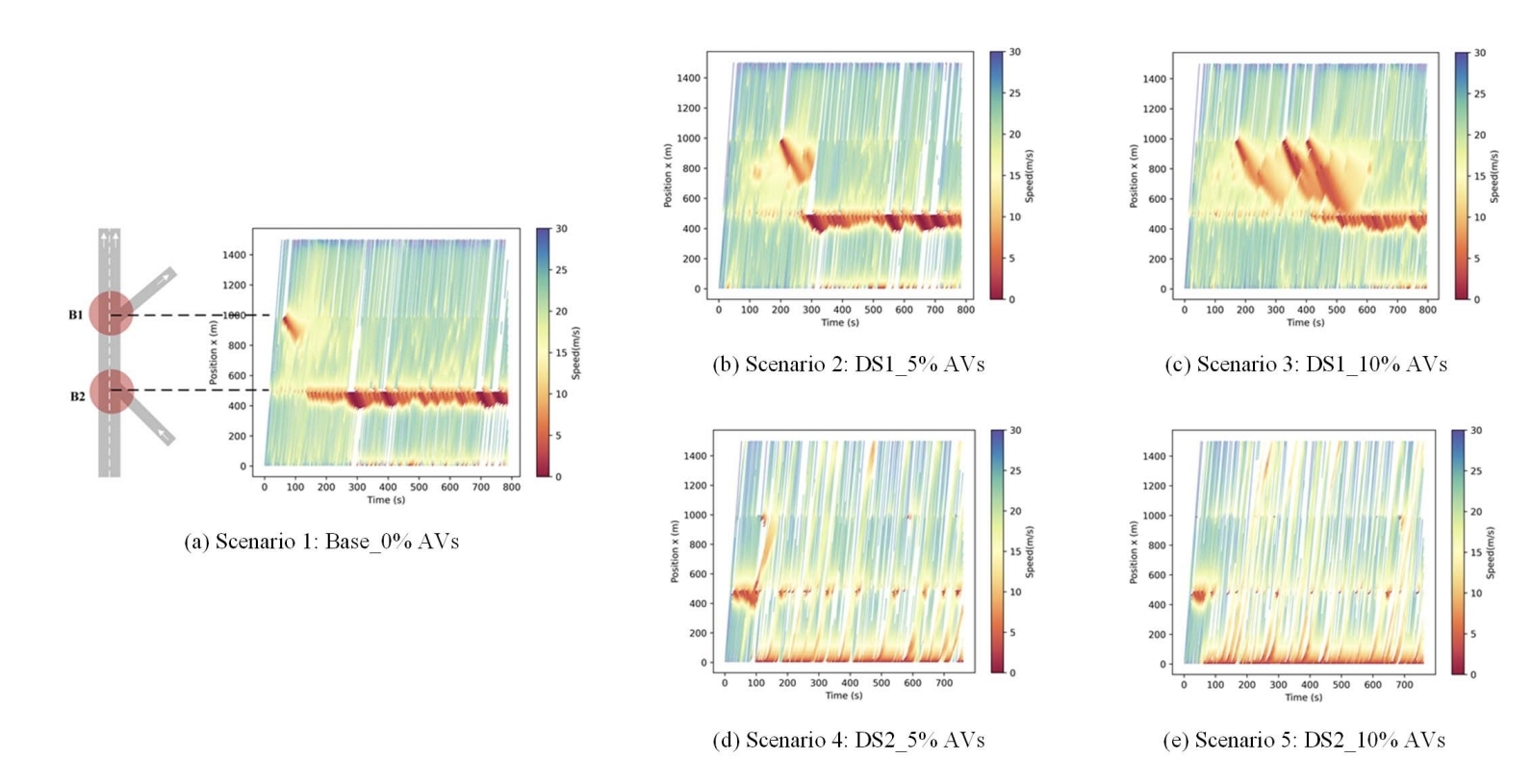
圖三:不同駕駛策略和滲透率的各種場景下的時空圖
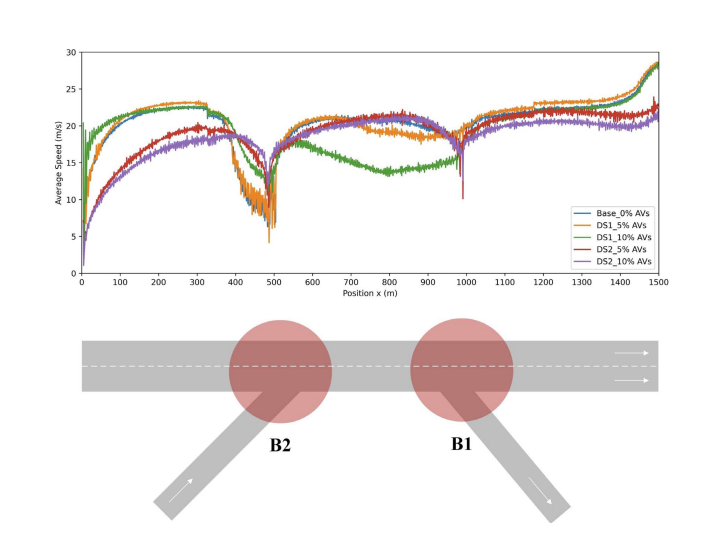
圖五:不同自動駕駛汽車滲透率和宏觀層面的驅動策略
論文地址:https://ieeexplore.ieee.org/document/9616413/